Control and Coordination - Solutions
CBSE Class 10 Science
NCERT Solutions
Chapter - 7
Control and Coordination
Page No. 119
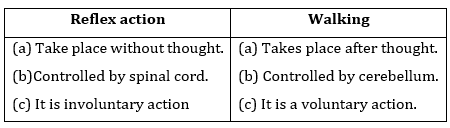
1. What is the difference between a reflex action and walking?
Ans. Difference between reflex action and walking:
2. What happens at the synapse between two neurons?
Ans. At synapse,the electrical impulse generated at dendrite of a neuron is passed on to dendrite of another neuron in form of chemical impulses. The chemical present at synapse is called neurotransmier.
3. Which part of the brain maintains posture and equilibrium of the body?
Ans. Cerebellum
4. How do we detect the smell of an agarbatti (incense stick)?
Ans. Smell of agarbatti is detected by olfactory receptors in the temporal lobe of fore-brain. It is first received by olfactory receptors in our nose.
5. What is the role of brain in reflex action?
Ans. Reflex action are formed in the spinal cord itself although the information also goes on to brain where the encounter remains the memory and make us aware of our action.
Page No. 122
1. What are plant hormones?
Ans. They are chemical which help to coordinate growth, development, flowering and response to the environment in plants.
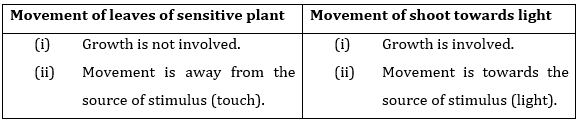
2. How is the movement of leaves of the sensitive plant different from the movement of a shoot towards light?
Ans. Difference between movement of leaves of sensitive plants and movement of shoot towards light:
3. Give an example of a plant hormone that promote growth.
Ans. Auxin promotes growth.
4. How do auxins promote the growth of a tendril around a support?
Ans. When tendrils come in contact of any support, the part of the tendril in contact does not grow as rapidly as the part away from the object due to auxin secreted moves away from the object in contact. This rapid growth on one side causes tendril to circle around the object.
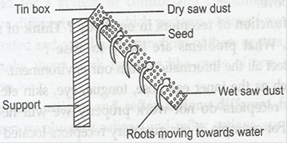
5. Design an experiment to demonstrate hydrotropism.
Ans. Take a tin box with hole at bottom. Fill it with moist saw dust. Sow some gram seeds in it. Keep the tin box in tilted position. When seeds start germinating, water the saw dust only in lower side of the tin box. You will observe that the radicle move towards the wet saw dust. This shows that root is positively hydrotropic.
Page No. 125
1. How does chemical coordination take place in animals?
Ans. The chemical coordination is maintained by hormones. These are secreted by endocrine glands. These hormones are poured into blood through which they reach the target tissue or organ to act.
2. Why is the use of iodised salt advisable?
Ans. Iodine is necessary for the thyroid gland to make thyroxin hormone. In case, iodine is absent in our diet, there is a possibility of Goitre. Iodised common salt contains proper content of iodine. To avoid deficiency of iodine, iodised salt is recommended.
3. How does our body respond when adrenaline is secreted into the blood?
Ans. When adrenaline reaches the various target organ through blood. All these organs respond together to enable our body to deal with situation like running away from scary situation. When adrenaline reaches the heart, it beats faster to supply more oxygen to our muscles. The small arteries around digestive system and skins contracts to divert the blood towards muscles. All these response enable our body to deal with situation.
4. Why are some patients of diabetes treated by giving injections of insulin?
Ans. Diabetes is caused due to non or less secretion of hormone insulin by pancreas. In such person, the blood sugar level is high. Insulin converts extra sugar present in blood into glycogen. Patients suffering from diabetes are given insulin injection to control their blood sugar level.
TEXTBOOK EXERCISES
1. Which of the following is a plant hormone?
(a) Insulin
(b) Thyroxin
(c) Oestrogen
(d) Cytokinins
Ans. (d) Cytokinin.
2. The gap between two neurons is called a
(a) Dendrite
(b) synapse
(c) axon
(d) impulse
Ans. (b) Synapse.
3. The brain is responsible for
(a) thinking
(b) regulating the heartbeat.
(c) balancing the body
(d) all of above.
Ans. (d) All the above.
4. What is the function of receptors in our body? Think of situation where receptors do not work properly. What problems are likely to arise?
Ans. Receptors detect all the information from our environment. These receptors are located in our sense organs.
In case any of the receptors do not work properly we will not be able to perceive that particular information.
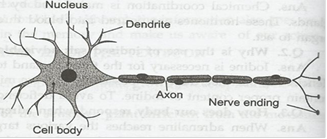
5. Draw the structure of a neuron and explain its function.
Ans. Neuron acquires particular information through dendrite located on its cell body. This information is then passed on to the axon. Finally, axon ending passes the information into next neuron at the synapse. As soon as the impulse reaches the dendrite, an electrical impulse is generated due to certain chemical changes in neuron. When the impulse reaches axon ending some chemicals released which pass on the impulse to next neuron. These chemicals are known as neurotransmitters.
6. How phototropism does occur in plants?
Ans. Movement of shoot towards light is called phototropism. This movement is caused due to more growth of cells towards the shaded side of the shoot as compared to the side of shoot towards light. More growth of cells is due to secretion of auxin towards the shaded side.
7. Which signals will get disrupted in case of a spinal cord injury?
Ans. (i) Reflex action
(ii) Impulses from various body parts will not conducted to brain.
(iii) Message from brain will not be conducted to various organs.
8. How does chemical coordination occurs in plants?
Ans. Chemical coordination in plants is maintained by plant hormones also known as phytohormones. Some of these hormones promote growth while some inhibit it. Some hormones include auxin, Gibberellins, Cytokinin etc.
9. What is the need for a system of control and coordination in an organism?
Ans. An organism has different organs which perform various factions. The survival of an organism depends on integrated and coordinated functions of these organs. Nervous and endocrine system of an organism makes them work together like parts of one machine to accomplish homeostasis or coordination.
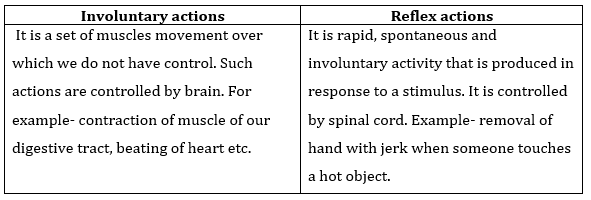
10. How are involuntary actions and reflex actions different from each other?
Ans. Difference between involuntary and reflex actions is as follows:
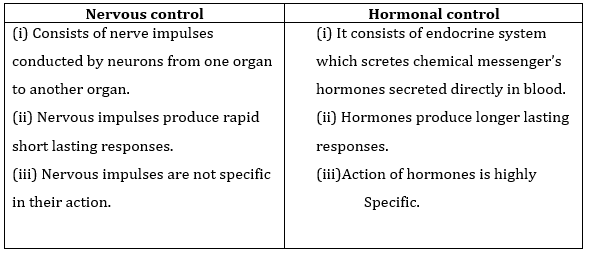
11. Compare and contrast nervous system and hormonal control and coordination in animals.
Ans. Difference between nervous control and hormonal control:
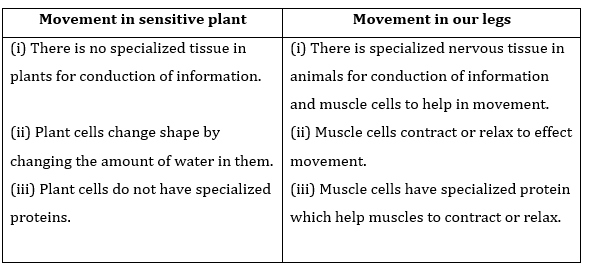
12. What is the difference between the manner in which movement’s takes place in a sensitive plant and movement in our legs?
Ans. Difference between movement in a sensitive plant and movement in our legs: